User Tools
quadricone-model
Table of Contents
Quadricone model, Buhne A, Zurich
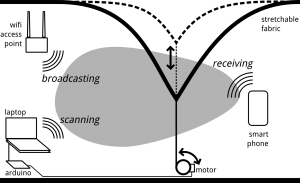
The Quadricone modela was produced for and presented at a research symposium 'Stage digital – a scenographic expedition', organised by SINLAB and ZHDK at Bühne A in Zurich, in November 2012. It introduced more formal complexity, reacting to any four wireless networks that were active in the space.
a video of the installation http://vimeo.com/57664764
technical details
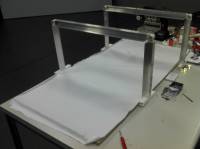
set of frames with motors + stretchable fabric attached to a wooden board
hardware
- the structure:
- particle board 1.6mm, 50x100cm
- 4 aluminium frames made from a 10x22mm profile, 50x25cm
- 4 HiTEC ultra torque servo motors, HS-645MG
- rotary to linear translation mechanism



- controls:
- Arduino Mega (ATMEGA1280) board
- laptop, scanning and sending data to Arduino

- quadricone: making of pictures
software
- aircrack-ng, scanning network traffic (looks up the traffic on all available networks, writes a dump to a .csv file)
- Arduino-Python 4-Axis Servo Control firmware by Principialabs, with the associated servo.py library
- python script quadricone.py, acts as intermediary (reads the .csv file, finds four most active networks and calculates the position of motors based on the difference in the number of packets from the previous calculation)
HOWTO
- use this startup.sh script
or
- start aircrack
airmon-ng start wlan0
(this will create an instance of the interface in the monitor mode, mon0)
airodump-ng -o csv -w [a file] mon0
* in a separate terminal, run the python script:
python quadricone.py
* alternatively, to check the functioning of the system without motors, run quadricone test script
python quadricone-test.py
- when finished, stop airmon-ng
airmon-ng stop wlan0 airmon-ng stop mon0
quadricone-model.txt · Last modified: 2015/04/29 12:04 by zoza
Except where otherwise noted, content on this wiki is licensed under the following license: GNU Free Documentation License 1.3
